05Harris角点检测
局部特征
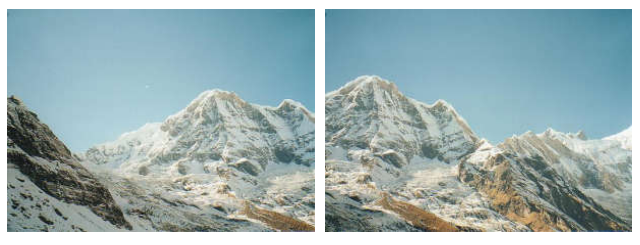
1、全景拍照¶
常应用:全景拍照(拍很多照片,连起来,形成全景) 怎么拼起来?(要解决的问题
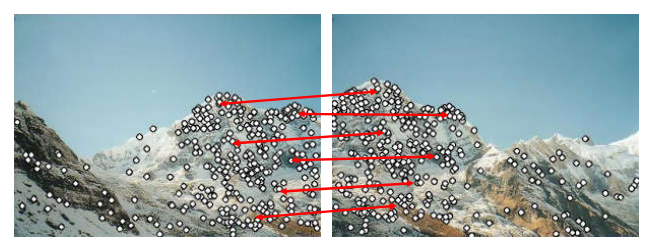
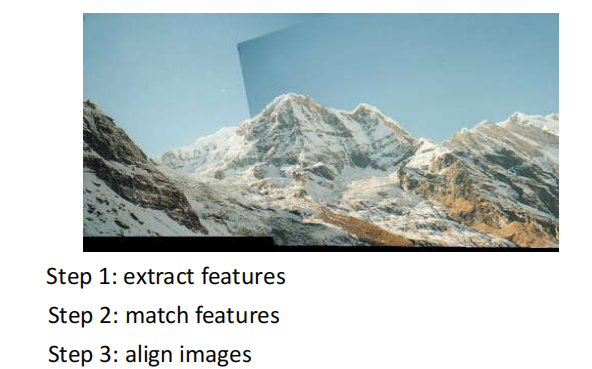
怎么办 1.提取特征 2.匹配特征 3.拼接图片
|  |
|---|
 |
|  |
|  |
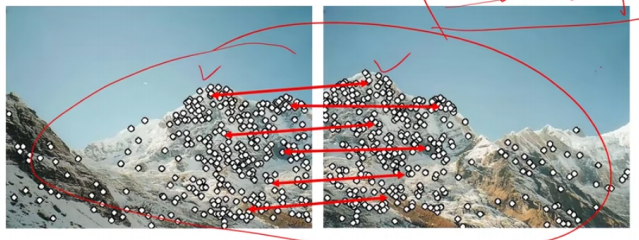
好的特征 - 重复性:两个图形的重复部分要多 - 显著性:特征要有意义 - 计算起来要高效 - 局部性
总结,要干什么 1.找特征,有特定的点 2.找匹配关系 3.拼接图像

2、角点检测¶
什么是角点:在两个及以上的方向有变化的点 角落是可重复的和独特的
怎么识别角点 我们应该可以很容易地识别要点,向任何方向移动窗口都会有很大的强度变化
看窗体里面的内容变不变



 转换,为了找E(u,v)与u,v关联
转换,为了找E(u,v)与u,v关联


 ==过程听不太懂不理解==
==过程听不太懂不理解==

结论
 更简洁的
更简洁的

1.计算每个像素的高斯偏导 2.计算每一个像素的二阶矩矩阵 3.计算R值 4.门限R 5.非极大值抑制 |
Harris detector: Steps 1. Compute Gaussian derivatives at each pixel 2. Compute second moment matrix M in a Gaussian window around each pixel 3. Compute corner response function R 4. Threshold R 5. Find local maxima of response function (nonmaximum suppression) |
|---|


- 我们希望角落的位置对光度测量的不变性 变化和几何变化的协变性。 - 不变性:图像被转换后,角的位置不会改变
- 协变性:如果我们有同一图像的两个转换版本。特征应该在相应的位置被检测到
==Affine intensity change==(后续未看